SLAM-惯性测量单元IMU的深入分析 IMU一般输出至少有六轴传感器信息,包括三轴的角速度(陀螺仪)以及三轴的线加速度(加速度计)。值得注意的是IMU的测量值依赖于惯性系,这个是由其测量模型决定的,同时IMU一般刚性安装在机器人(小车)上,且所以我们一般认为IMU输出的是机体坐标系下的惯性测量值。 测量模型 加速度计 首先对... March 5, 2025 less than 1 minute read
SLAM-NDT NDT算法的大名为Normal Distribution Transform,即正态分布变换,用于激光点云配准。算法的核心也正如其名,将目标点云按照体素(栅格)的方法划分,得到每个格子中点云的正态分布参数,再计算待配准点云在各个格子中的概率分布之和,这个值越大,那么配准结果越好。 February 24, 2025 less than 1 minute read
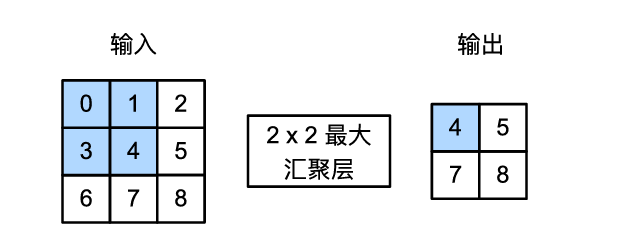
dl-r-02卷积深度视觉 在前文的讨论中,我们从线性回归出发,一步步延展到全连接的多层网络,也使用了一个多层网络去进行图像处理。但是值得注意的是,事实上,我们是仅仅将这些图像数据展平成了一维的向量,很显然这忽略了图像的空间特征【我们都知道图像的数据存储模式是一个多维的矩阵,嗯,是的都知道的】;同时对于一个百万像素的图像... January 14, 2025 1 minute read
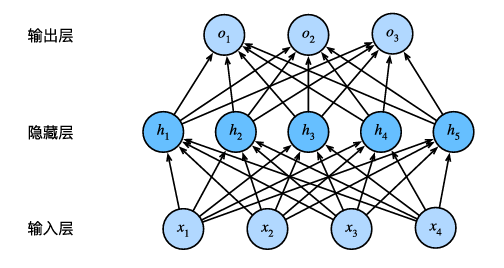
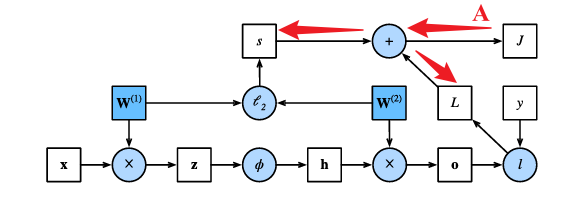
dl-r-01线性多层与反向传播 在机器学习领域,仿射变换(带偏置的线性变换)是基础模型架构的核心,如 softmax 回归通过单一线性映射加激活函数实现分类。但线性假设存在显著局限: 单调性约束过强:例如收入与还款概率虽呈正相关,但非严格线性;体温与死亡率更呈现非线性的 “U 型” 关系,简单线性模型无法准确建模。 ... January 8, 2025 2 minute read
dl-r-00线性全连接 线性回归 线性回归(linear regression)使用一个线性模型来定义, 将所有特征放到向量$\mathbf{x} \in \mathbb{R}^d $ 中,并将所有权重放到向量 ,$\mathbf{w} \in \mathbb{R}^d$ 中,我们可以用点积形式来简洁地表达模型: ... January 1, 2025 1 minute read
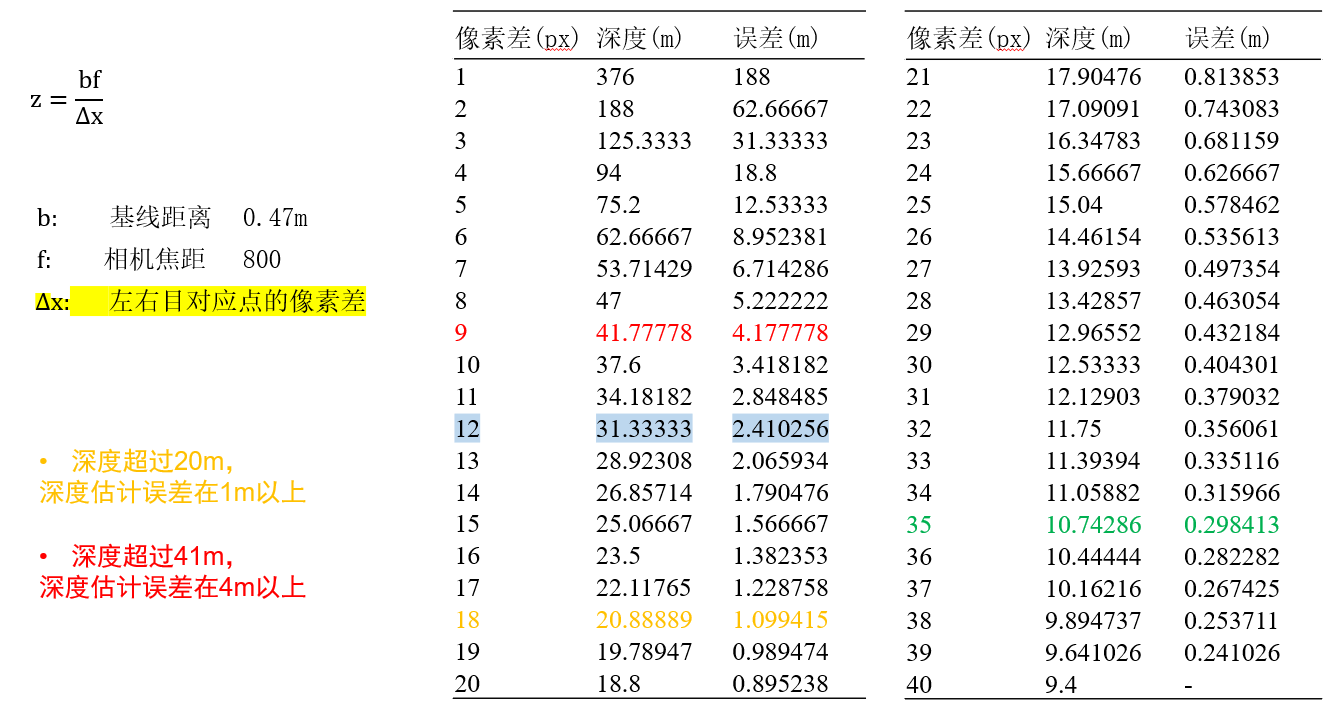
SLAM-相机模型 针孔相机 VSLAM前端的核心目的是得到相机的位姿状态与环境信息,特征点法则是现有体系中VSLAM前端的主要方法之一,能够通过特征点在图像中位置的变化来得到位姿。其基本原理可以概述为,空间中一个固定的点在不同位置的相机中观测到的是不同的,那么我们可以根据其中的几何关系来推知不同位置的相机之间... December 21, 2024 less than 1 minute read
SLAM-旋转02:李群与李代数 本篇文章旨在记录在SLAM中常用的特殊正交群与其李代数相关性质的推导,不对流形及其正切空间更为复杂的几何性质做讨论。 December 7, 2024 3 minute read
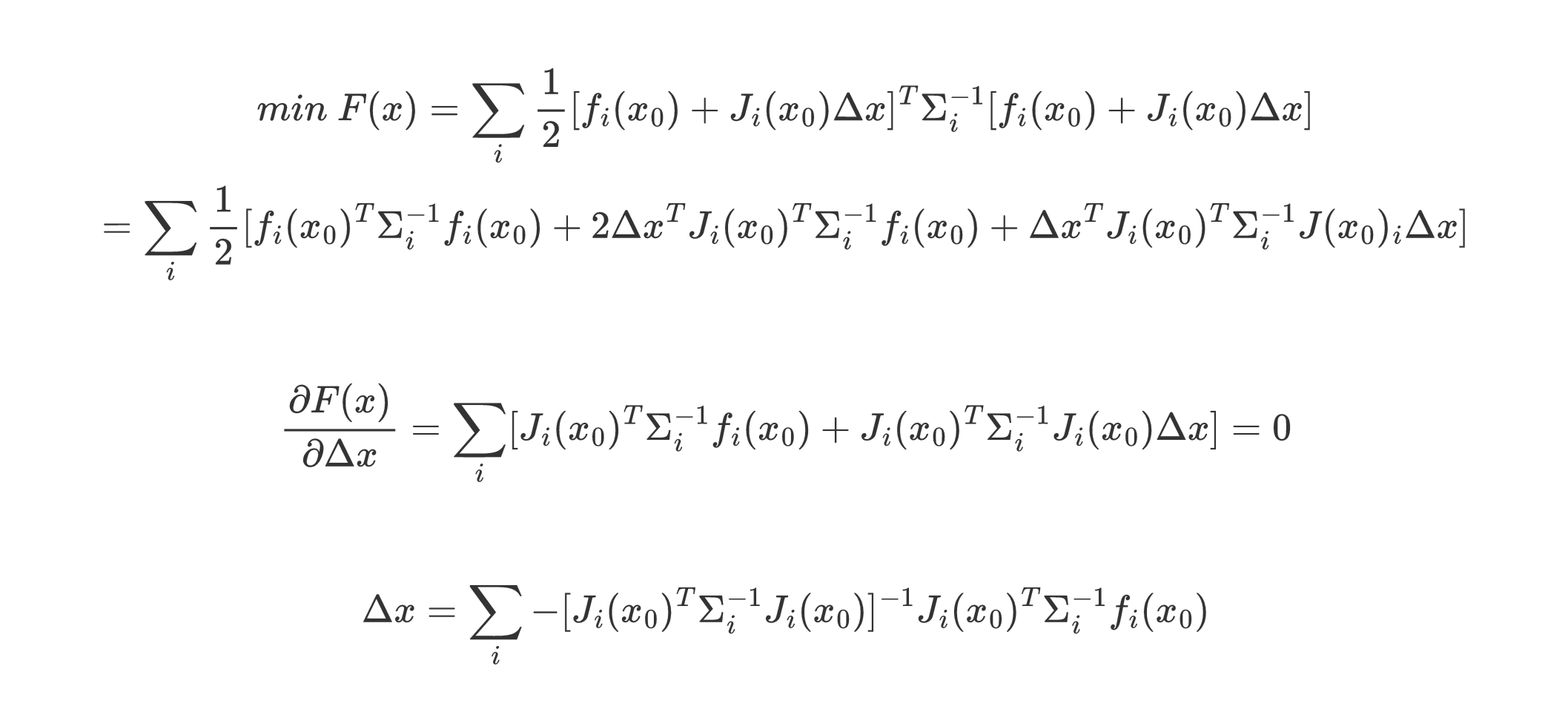
Unconstrained Optimization: Gauss-Newton Method The role of unconstrained optimization in robotics is unquestionable. This blog simply records the derivation of the Gauss-Newton method in unconst... November 24, 2024 3 minute read
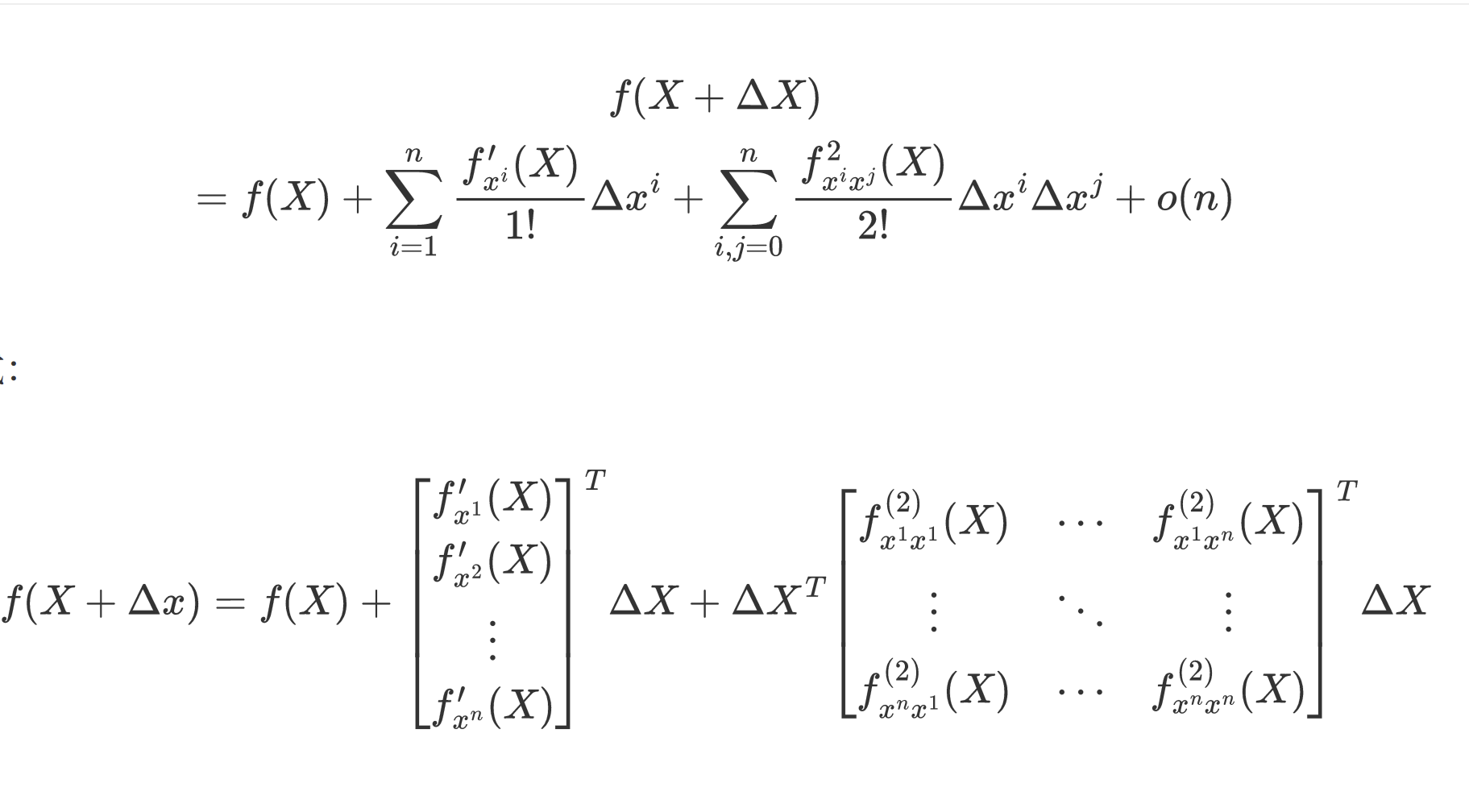
Taylor expansion of a Multi-dimensional function The Taylor expansion of a function expands a nonlinear function at a certain point to obtain a polynomial that can approximate the original functio... November 21, 2024 1 minute read
From high-dimensional Gaussian distribution to least squares For high-dimensional Gaussian distribution $X\sim N(\mu,\Sigma)$, November 20, 2024 less than 1 minute read
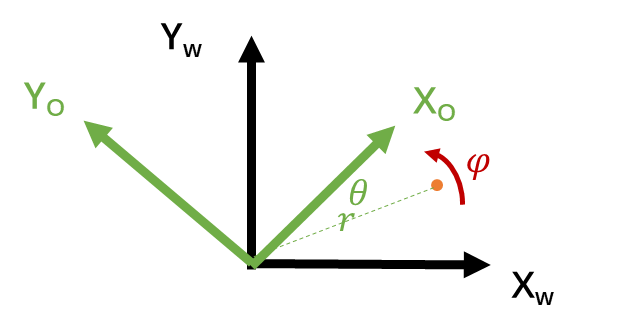
Rotation01: Euler Angles and Rotation Matrix In the field of robot localization, we typically use rotation and translation to represent the robot’s pose (position and orientation), which is ba... November 15, 2024 9 minute read
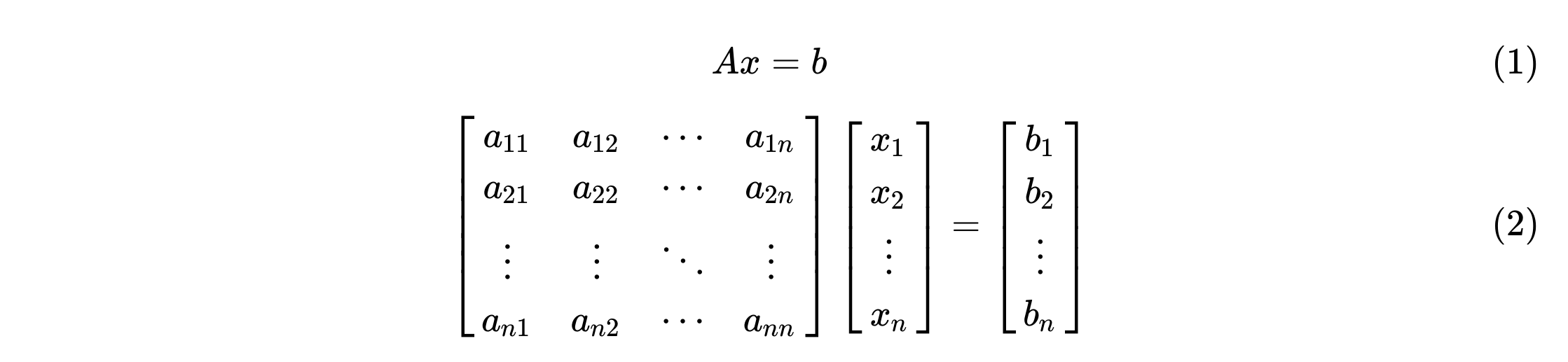
Numerical Analysis: Solve linear Equations Regarding the numerical solution of linear equations, there are four main cases for discussion. Finally, let’s analyze the error topic. October 21, 2024 7 minute read
Numerical Analysis: Polynomial interpolation In engineering problems or scientific experiments, we sometimes face the following problem: we can only measure the function value or derivative va... October 21, 2024 6 minute read
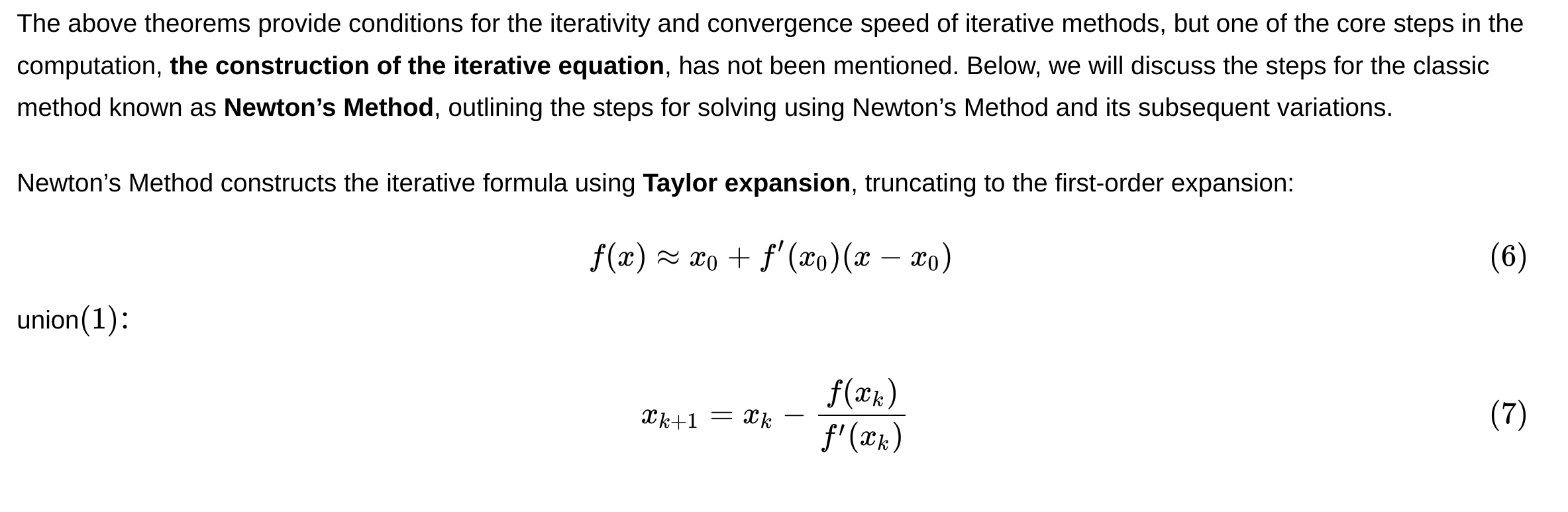
Numerical Analysis: Solve Nonlinear Equations Define nonlinear the nonlinear equation, Discussing how to solve it, let’s see the following, September 26, 2024 9 minute read
Numerical Analysis: Introduction To study a subject and understand a field, it’s essential to explore its background and the issues it aims to address. In the case of numerical ana... September 10, 2024 3 minute read
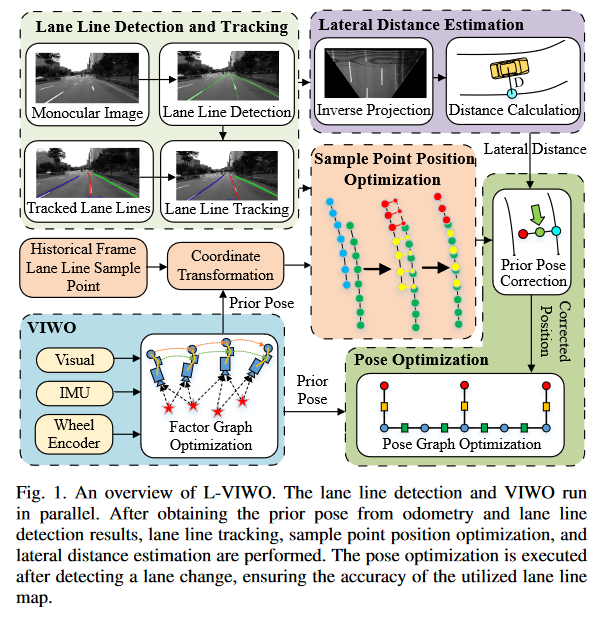
L-VIWO: Visual-Inertial-Wheel Odometry based on Lane Lines In the process of autonomous vehicle localization, road markings such as lane lines are frequently employed in schemes that match semantic informat... August 27, 2024 10 minute read
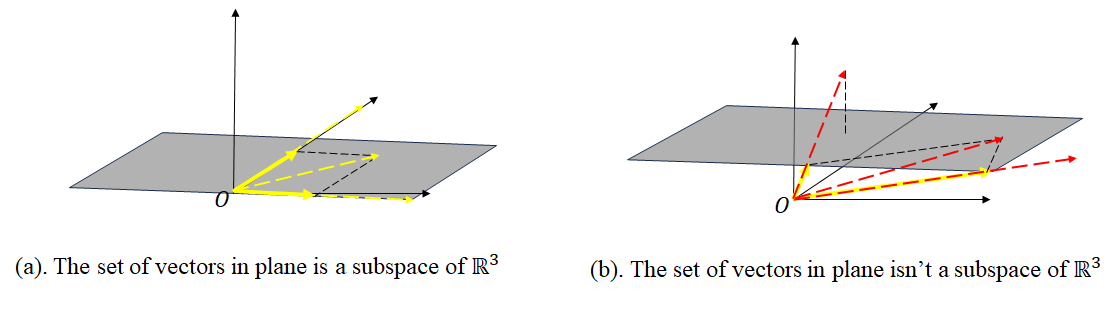
Relearn Linear Algebra: Vector Space Regarding the concept of vector space, Wikipedia explains it as follows: A vector space is a special set formed by a group of mathematical fields ... August 18, 2024 2 minute read
Relearn Linear Algebra: LU decomposition Lower-upper (LU) decomposition is a kind of matrix decomposition, which can decompose a matrix into the product of lower triangular matrix and uppe... August 11, 2024 3 minute read
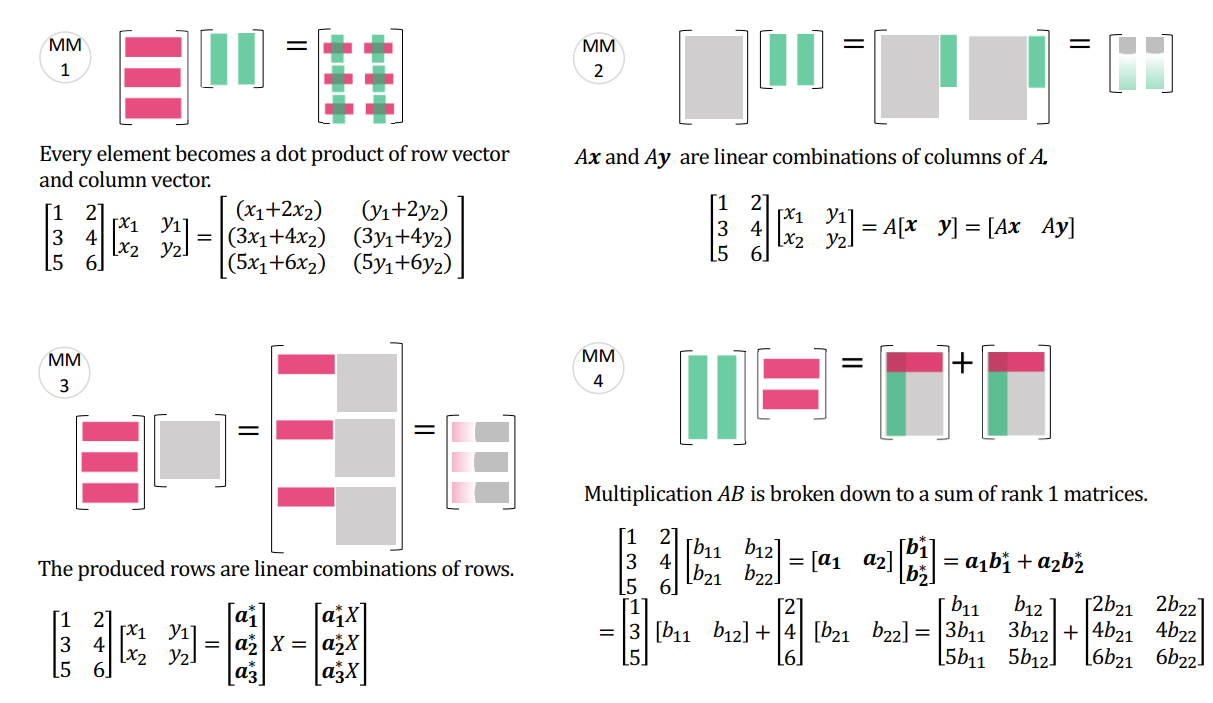
Relearn Linear Algebra: the Basic of Matrix Linear algebra is a compulsory course for every engineering student, and recently, in the study of computer graphics and robotics, I was deeply imp... August 10, 2024 5 minute read
Deployment of YOLOv8 on ONNX Runtime (C++) In a certain Ubuntu desktop application project, a visual object detection module is required. This desktop application is implemented in C++ based... May 29, 2024 10 minute read